Real-Time Dynamic Object Tracking in SLAM: Indoor Navigation for Autonomous Robots
Keywords:
Dynamic Object Tracking, Indoor Navigation, Autonomous Robots, Real-Time Processing, Semantic SegmentationAbstract
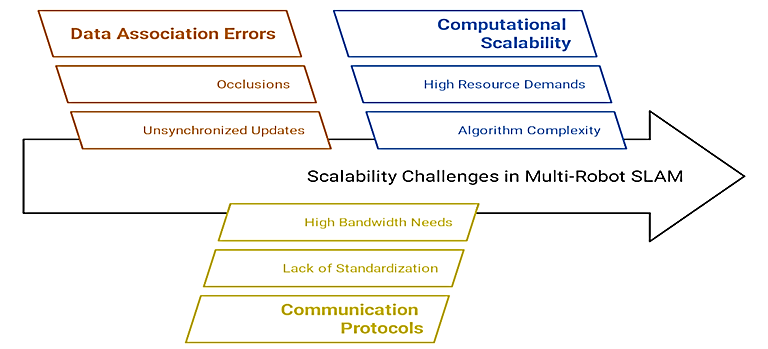
This review synthesizes recent literature on real-time dynamic object tracking in Simultaneous Localization and Mapping (SLAM) for indoor autonomous robotic navigation, emphasizing advancements, challenges, and future directions in human-populated environments such as hospitals and warehouses. Deep learning models (e.g., YOLOv8, YOLOv9S) and semantic SLAM frameworks enable precise dynamic segmentation and tracking, achieving reported ATE/RPE reductions of 20–40% in controlled benchmarks like TUM RGB-D dynamic sequences. Sensor fusion with LiDAR, RGB-D, and IMU enhances robustness by 20–30% in low-texture, reflective, or low-light conditions, while emerging edge-cloud hybrids, self-supervised learning, and large vision models improve adaptability and deployability. Significant limitations persist: multi-object tracking in crowded scenes can degrade accuracy by up to 80% due to occlusions and motion blur; semantic integration incurs 30–50% latency penalties on edge devices; high computational demands (>11 GB VRAM) restrict low-cost platforms; and the absence of standardized dynamic benchmarks leads to 15–25% higher real-world errors. Multi-robot systems face synchronization and data association issues, inflating errors by up to 30%. Robust dynamic SLAM is critical for safe human-robot interaction in healthcare logistics, warehouse automation, and assistive robotics—sectors projected to see 30% AMR growth by 2030. Future efforts should prioritize lightweight hybrid algorithms, standardized dynamic datasets, reliable edge-cloud protocols, and adaptive AI models to close controlled-to-real-world gaps and enable scalable, affordable deployment.