Enhancing the Performance of DC Servomotor Based Antenna Position Control System in Satellite Communication Using PID-LQR
An Application of PID Optimized Discrete-time LQR
Keywords:
Antenna, Communication, PID, Discrete-time PID-LQR, DC servomotor, Position control system, SatelliteAbstract
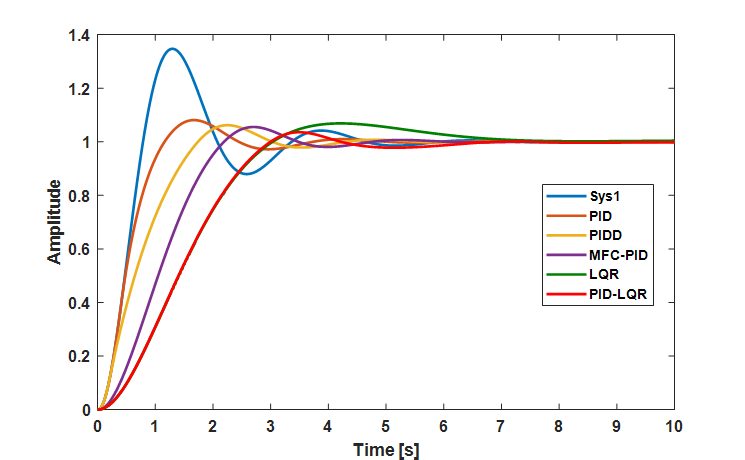
In this work, a control system has been designed based on Proportional Integral Derivative (PID) optimized discrete-time Linear Quadratic Regulator (LQR) called PID-LQR and implemented with a DC servomotor-based antenna positioning control system in MATLAB/Simulink environment. The system response was analyzed considering the uncompensated state, the results obtained were presented in terms of steady-state transient response characteristics, which were rise time, peak time, settling time, overshoot, and steady-state error. In the uncompensated state, the rise time was 0.52s, peak time was 1.30s, settling time was 4.35s, overshoot was 34.7%, and steady-state error was 0. Considering the high value of overshoot, a LQR was designed and incorporated into the system to form a closed-loop control system, and simulation conducted revealed that the cycling associated with the uncompensated because of high overshoot (34.7%) was greatly reduced to 6.43% and steady-state error of 0 was achieved. The performance of LQR was further optimized by integrating PID parameter. PID-LQR reduced the rise time from 2.02s to 1.98s, peak time from 4.20s to 3.49s, settling time from 6.11s to 3.94s, and overshoot from 6.43% to 3.80%. These reductions in transient response parameters revealed that the designed PID-LQR yielded the most effective response in terms of stability. This is because the PID-LQR provided most smooth and most stable response compare to other control systems measured against the uncompensated system. Therefore, the use of the PID-LQR provided more stable and reliable tracking for antenna positioning system in satellite dish antenna for deep space application.